Hace
tiempo vi en una web asiática de venta de productos mecatrónicos un barato kit
de montaje. Se trataba de un vehículo de cuatro ruedas con tracción a los dos
ejes, dotado del típico motor eléctrico de corriente continua empleado para
juguetes y un portapilas para dos baterías de 1,5 V. Me pareció interesante de
cara al desarrollo de equipos educativos. A mi cabeza vinieron ideas como
añadirle sensores de ultrasonidos o infrarrojos para cuantificación de
distancias, una placa programable ARDUINO o incluso algún sencillo mecanismo
robotizado para la manipulación de objetos.


Esta
misma mañana me he puesto a montarlo. Y la primera conclusión que he sacado es
aquella que versa sobre la frecuente divergencia entre precio y calidad. En
este caso se vuelve a repetir el tópico de que los gigantes asiáticos tienen
sus fortalezas y debilidades. Lo que parece sencillo puede acabar complicando
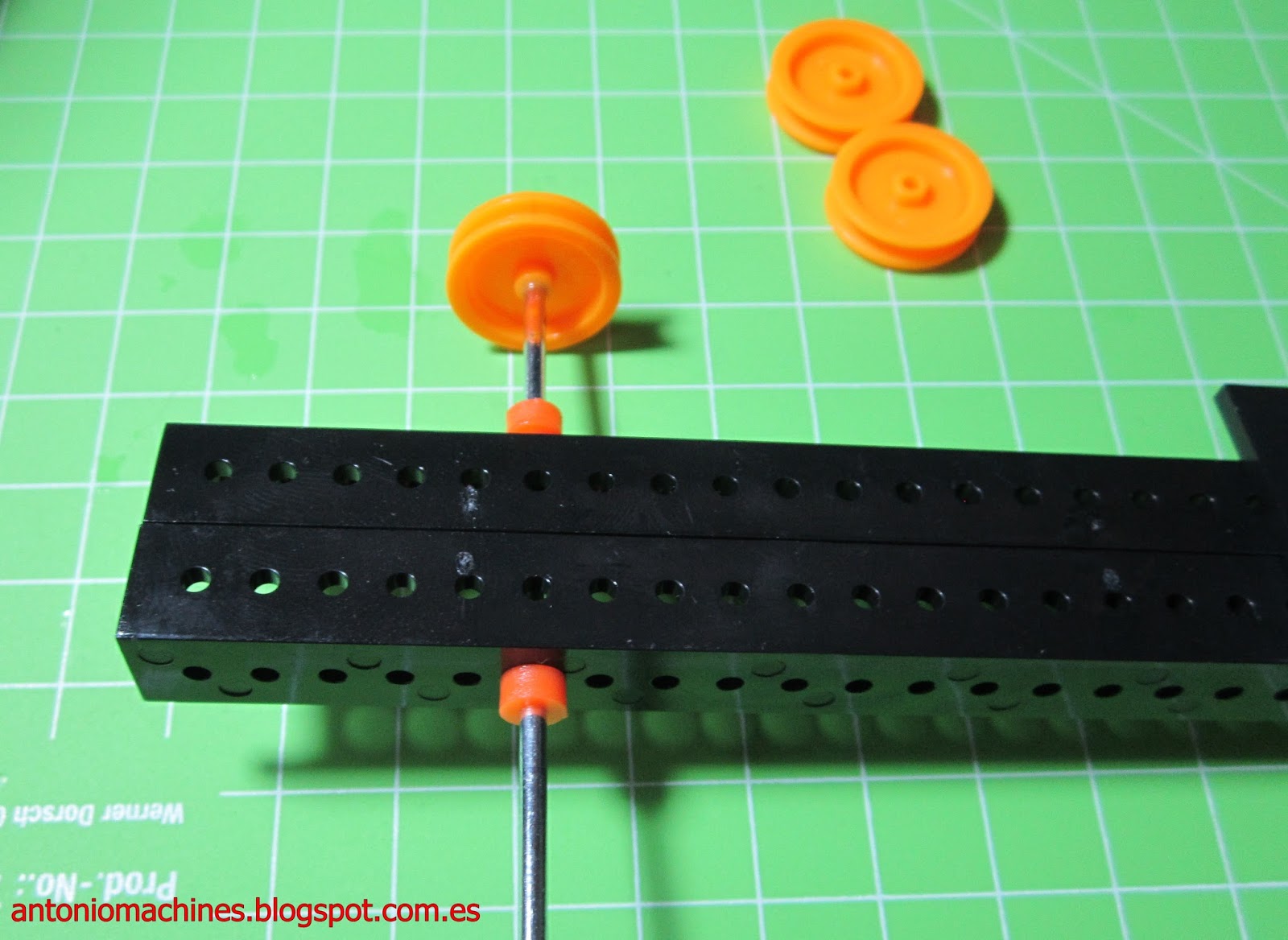
bastante. El bastidor está formado por dos perfiles en "L" de alas
iguales. Quedan unidos, que no fijados, mediante los ejes de las ruedas, los
cuales ya cuesta lo suyo hacer pasar por lo agujeros de los perfiles. De hecho,
para el resto del montaje he necesitado aplicar un lubricante para modelismo
ferroviario. Algo que, de forma gráfica, no se indica en las instrucciones.








Está
muy bien aplicar uniones desmontables mediante tornillo y tuerca a la hora de
proyectar la unión entre piezas. Pero se ha de tener en cuenta con qué
herramientas se van montar y si en el conjunto queda espacio para tales útiles.
Además, para poder apretar la tuerca y el tornillo se necesita inmovilizarlos,
lo que suele demandar dos manos. Gracias a la necesidad he ingeniado usar el
destornillador como pata de apoyo mientras que con un alicate de punta fina y
paciencia he logrado enroscar las tuercas. También he acabado aplicando
lubricante en las roscas de los tornillos para facilitar la operación. Gracias
a la disposición de la rueda dentada del eje del lado del motor y sus poleas,
dicho elemento queda más o menos fijado. Pero lograr que las poleas del otro
eje queden en el mismo plano que las anteriores, es otra historia. El grado de
apriete entre eje y agujeros es excesivo de cara al montaje, incluso usando
lubricante. He tenido que desistir en alcanzar el paralelismo entre las dos
correas transmisoras en pos de mis nervios. No se trata de un mecanismo que
exija perfección. He montado los dos parachoques y ajustado el motor. Un
apriete excesivo de los tornillos que lo sujetan puede provocar demasiada presión
entre las ruedas dentadas, provocando el atoramiento de esta pequeñita máquina
eléctrica.








Todo
este montón de quejas expuestas hasta ahora las quiero reenfocar de manera
constructiva. Por algo barato no podemos esperar gran cosa. Mas hay que evaluar
si para el fin pretendido gastar más dinero merece la pena. Es más, con esta
experiencia he aprendido y recordado conceptos importantes a la hora de diseñar
un producto. El diseño no sólo ha de contemplar cuestiones como el uso o ciclo
de vida del producto. También asuntos como el montaje y quien lo va a realizar.
Yo no recomendaría este aparente coche de juguete para ningún niño o incluso
adolescente. Mi experiencia como profesor me está demostrando que la paciencia
y tolerancia a la frustración entre nuestros jóvenes es muy baja. Conviene
medir muy bien el grado de dificultades para evitar que se bloqueen y acaben
abandonando la actividad. Aprender a tolerar y gestionar las dificultades
implica necesariamente enfrentarse a ellas. Pero en cuestión de robótica
educativa veo problemático el que se tengan que detener demasiado tiempo en
intentar apretar cuatro tornillos y tuercas porque no tienen espacio para usar
las herramientas ni ergonomía para sus manos.


El
siguiente paso será diseñar y construir una pista sobre la que este carro de
desplazará en un sentido y otro.
No hay comentarios:
Publicar un comentario